Fournisseur d'équipements de test
 ISO 9001: 2015 certifié
ISO 9001: 2015 certifié Français ISO 9001: 2015 certifiéFrançais
Français ISO 9001: 2015 certifiéFrançais
loading

TBTCDS-1
TBTSCIETECH
| État de disponibilité: | |
|---|---|
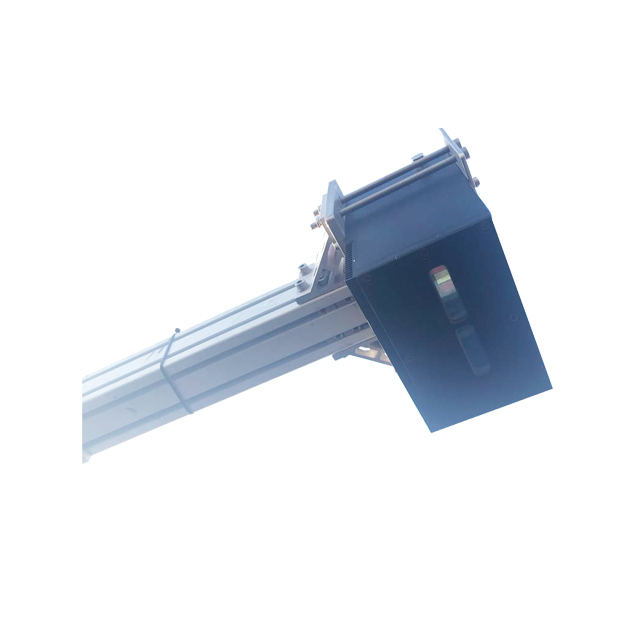
Le système utilise la caméra à balayage linéaire haute résolution pour balayer de manière transparente les voies à une distance longitudinale de 1 mm, chaque 2048 mm forme une image de la route.L'éclairage assisté par laser infrarouge est utilisé pour obtenir une détection normale de la route par tous les temps et dans des environnements spéciaux (tels que les tunnels, les ponceaux, les jours nuageux, les nuits, etc.) pour obtenir de vraies images de la route.
Ce système est une version 2D ;
Le système utilise la caméra à balayage linéaire haute résolution pour balayer de manière transparente les voies à une distance longitudinale de 1 mm, chaque 2048 mm forme une image de la route.L'éclairage assisté par laser infrarouge est utilisé pour obtenir une détection normale de la route par tous les temps et dans des environnements spéciaux (tels que les tunnels, les ponceaux, les jours nuageux, les nuits, etc.) pour obtenir de vraies images de la route.
Ce système est une version 2D ;
1. Couverture complète des voies, données complètes
Le système adopte la conception de structure spéciale d'une caméra/laser unique, la largeur de détection de surface de route conçue peut atteindre 3,5 m ou plus, réalisant la collecte de données de surface de route pleine largeur.
2. Fournir une sélection de réglage de l'exposition et du gain
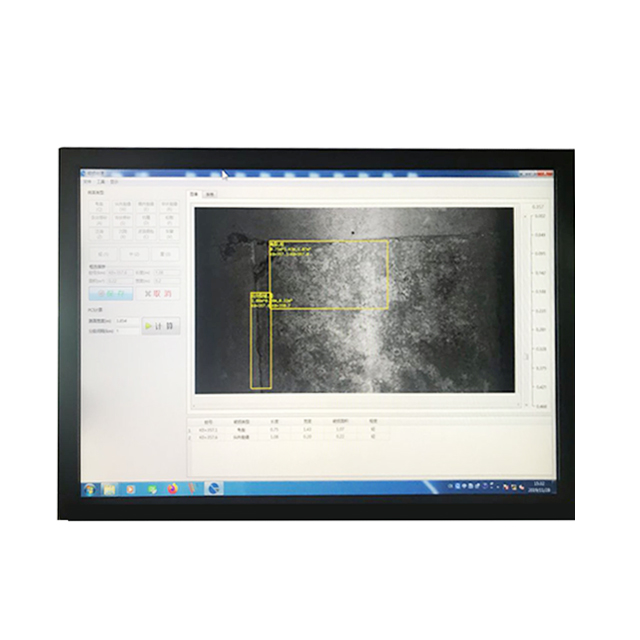
Le système prend en charge l'exposition de la caméra et le réglage du gain.Pendant le processus de détection, une solution appropriée peut être rapidement sélectionnée pour améliorer l'efficacité du réglage manuel.
3. Haute qualité d'image
Le système adopte une conception de structure de filtre, qui élimine l'influence de la lumière naturelle et de l'ombre de la carrosserie du véhicule sur la qualité de l'image, ce qui garantit que la qualité de l'image est claire.
1. Couverture complète des voies, données complètes
Le système adopte la conception de structure spéciale d'une caméra/laser unique, la largeur de détection de surface de route conçue peut atteindre 3,5 m ou plus, réalisant la collecte de données de surface de route pleine largeur.
2. Fournir une sélection de réglage de l'exposition et du gain
Le système prend en charge l'exposition de la caméra et le réglage du gain.Pendant le processus de détection, une solution appropriée peut être rapidement sélectionnée pour améliorer l'efficacité du réglage manuel.
3. Haute qualité d'image
Le système adopte une conception de structure de filtre, qui élimine l'influence de la lumière naturelle et de l'ombre de la carrosserie du véhicule sur la qualité de l'image, ce qui garantit que la qualité de l'image est claire.
Article | Description | spécification |
Caméra | Résolution | 2048 × 1 |
Fréquence d'échantillonnage | 36 kHz | |
Appareil laser | Pouvoir | 7W |
Article | Description | spécification |
Système de fissure | Vitesse de détection | 0~100km/heure |
Temps de travail continu | Plus de 8 heures | |
Largeur de détection efficace transversale | 3.75m | |
Intervalle d'échantillonnage longitudinal | 1mm | |
Précision de regonisation des fissures | ≥1mm | |
Erreur de mesure de longueur longitudinale et transversale | ≤5% | |
Zone endommagée mesurant la répétabilité | ≥95% | |
Erreur relative de la zone endommagée | ±5% | |
Résolution de l'image | 2048 x 2048 | |
Degré de protection du boîtier de montage | IP65 |
Article | Description | spécification |
Caméra | Résolution | 2048 × 1 |
Fréquence d'échantillonnage | 36 kHz | |
Appareil laser | Pouvoir | 7W |
Article | Description | spécification |
Système de fissure | Vitesse de détection | 0~100km/heure |
Temps de travail continu | Plus de 8 heures | |
Largeur de détection efficace transversale | 3.75m | |
Intervalle d'échantillonnage longitudinal | 1mm | |
Précision de regonisation des fissures | ≥1mm | |
Erreur de mesure de longueur longitudinale et transversale | ≤5% | |
Zone endommagée mesurant la répétabilité | ≥95% | |
Erreur relative de la zone endommagée | ±5% | |
Résolution de l'image | 2048 x 2048 | |
Degré de protection du boîtier de montage | IP65 |




