Fournisseur d'équipements de test
 ISO 9001: 2015 certifié
ISO 9001: 2015 certifié Français ISO 9001: 2015 certifiéFrançais
Français ISO 9001: 2015 certifiéFrançais
loading

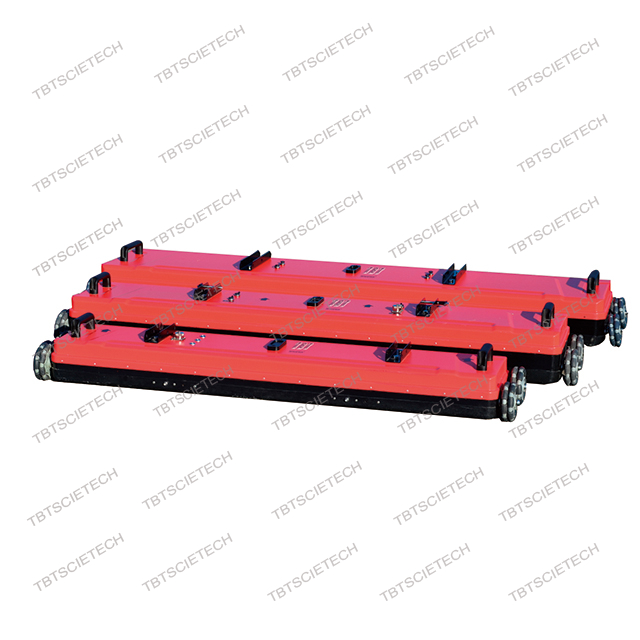
TBTGPR-MIMO
TBTSCIETECH
| État de disponibilité: | |
|---|---|
Le système de réseau GPR 3-D TBTGPR-MIMO est un système de détection à entrées et sorties multiples intégré à une antenne-contrôleur. La conception anti-vibration de qualité militaire le rend plus pratique et flexible à utiliser, même dans des environnements complexes, le système radar fonctionne toujours. de manière stable et fiable.L'uniformité parfaite des canaux garantit un bon effet d'imagerie et des fonctionnalités pratiques pour le traitement des données, le jugement et la localisation de l'imagerie.Il peut être largement utilisé dans la détection par imagerie des aéroports, des tunnels, des autoroutes, de la conservation de l'eau, des ponts, de l'ingénierie utilitaire, de l'armée et de l'archéologie.
Application:
Aéroport : inspection des maladies des pistes d'aéroport et du décollement des superpositions, inspection et évaluation de la qualité des pistes.
Autoroute : détection des maladies routières, de la profondeur et de la zone, détection du sous-sol, tassement des couches structurelles et détection des dommages.
Utilité : détection de maladies des routes urbaines ou de cavités, étude de pipelines et imagerie 3D de pipelines sous la route.
Fonctions et caractéristiques
1) Le contrôleur radar et le réseau d'antennes sont intégrés dans une petite taille et un poids léger, avec une faible consommation d'énergie.
2) Le câble réseau universel est utilisé pour la transmission de données, il est simple, courant et pratique.
3) Alimentation DC externe compatible 10V-18V.
4) Le réseau monofréquence et le réseau multifréquence garantissent pleinement diverses exigences de détection.
5) Le système d'antenne réseau MIMO avec une densité d'antenne plus élevée et une intégration plus élevée offre un bon effet d'imagerie.
6) Processus de détection et d'acquisition de données rapides, meilleure uniformité des canaux et des données de profil avec des intervalles réguliers.
7) Le logiciel d'acquisition en temps réel peut être installé dans ordinateurs portables ou autres terminaux portables pour un transport pratique et utilise.
8) Le logiciel d'acquisition en temps réel est avec fonctions de base de filtrage, suppression du décalage zéro, élimination de l'arrière-plan et tranche 3D en temps réel imagerie.
9) Système intelligemment ajuster les paramètres du radar pas besoin d'opération manuelle.
dix) Affichage de la vitesse du véhicule en temps réel, alarme de survitesse et alarme de signal GPS faible.
11) Relecture des données fonction permet de restaurer complètement le processus d’acquisition.
12) Afficher en temps réel le profil de coupe à profondeur spécifiée sur La voie de détection, le résultat de la détection est très clair.
13) Selon les informations de position GPS, affiche automatiquement la position GPS des données stockées, corrigez la ligne d'enquête prévue en fonction du lieu, pour obtenir une détection de couverture complète.
14) Le système peut effectuer une interpolation pour les zones non couvertes entre les lignes de levé pour former une couverture complète données, alors sortir un panorama image.
Le système de réseau GPR 3-D TBTGPR-MIMO est un système de détection à entrées et sorties multiples intégré à une antenne-contrôleur. La conception anti-vibration de qualité militaire le rend plus pratique et flexible à utiliser, même dans des environnements complexes, le système radar fonctionne toujours. de manière stable et fiable.L'uniformité parfaite des canaux garantit un bon effet d'imagerie et des fonctionnalités pratiques pour le traitement des données, le jugement et la localisation de l'imagerie.Il peut être largement utilisé dans la détection par imagerie des aéroports, des tunnels, des autoroutes, de la conservation de l'eau, des ponts, de l'ingénierie utilitaire, de l'armée et de l'archéologie.
Application:
Aéroport : inspection des maladies des pistes d'aéroport et du décollement des superpositions, inspection et évaluation de la qualité des pistes.
Autoroute : détection des maladies routières, de la profondeur et de la zone, détection du sous-sol, tassement des couches structurelles et détection des dommages.
Utilité : détection de maladies des routes urbaines ou de cavités, étude de pipelines et imagerie 3D de pipelines sous la route.
Fonctions et caractéristiques
1) Le contrôleur radar et le réseau d'antennes sont intégrés dans une petite taille et un poids léger, avec une faible consommation d'énergie.
2) Le câble réseau universel est utilisé pour la transmission de données, il est simple, courant et pratique.
3) Alimentation DC externe compatible 10V-18V.
4) Le réseau monofréquence et le réseau multifréquence garantissent pleinement diverses exigences de détection.
5) Le système d'antenne réseau MIMO avec une densité d'antenne plus élevée et une intégration plus élevée offre un bon effet d'imagerie.
6) Processus de détection et d'acquisition de données rapides, meilleure uniformité des canaux et des données de profil avec des intervalles réguliers.
7) Le logiciel d'acquisition en temps réel peut être installé dans ordinateurs portables ou autres terminaux portables pour un transport pratique et utilise.
8) Le logiciel d'acquisition en temps réel est avec fonctions de base de filtrage, suppression du décalage zéro, élimination de l'arrière-plan et tranche 3D en temps réel imagerie.
9) Système intelligemment ajuster les paramètres du radar pas besoin d'opération manuelle.
dix) Affichage de la vitesse du véhicule en temps réel, alarme de survitesse et alarme de signal GPS faible.
11) Relecture des données fonction permet de restaurer complètement le processus d’acquisition.
12) Afficher en temps réel le profil de coupe à profondeur spécifiée sur La voie de détection, le résultat de la détection est très clair.
13) Selon les informations de position GPS, affiche automatiquement la position GPS des données stockées, corrigez la ligne d'enquête prévue en fonction du lieu, pour obtenir une détection de couverture complète.
14) Le système peut effectuer une interpolation pour les zones non couvertes entre les lignes de levé pour former une couverture complète données, alors sortir un panorama image.
Paramètres du système radar GER-MIMO 3-D
Non. | Article | GER-MIMO 900A14RS Radar à réseau 3D | GER-MIMO400A10RS Radar à réseau 3D | GER-MIMO200A8RS Radar à réseau 3D |
1 | Numéros de chaînes | 14 | 10 | 8 |
2 | Profondeur de détection | ≥1,0m | ≥2,5 m | ≥4,0m |
3 | Couvrant largeur | 150 cm | 175 cm | 200 cm |
4 | Détection vitesse | ≥25 km/h (intervalle de 5 cm pour le scan) | ≥16 km/h (intervalle de 5 cm pour le scan) | ≥20 km/h (intervalle de 5 cm pour le scan) |
5 | Taille | 150x30x15cm | 175x32x20cm | 210x45x20cm |
6 | Poids | ≤20kg | ≤25kg | ≤30kg |
7 | Consommation d'énergie | ≤20W | ≤20W | ≤20W |
8 | Source de courant | Alimentation par batterie au lithium installée à l'extérieur 10 V ~ 18 V | ||
9 | Type de tableau | Réseau d'antennes MIMO | ||
10 | Octets A/D | 16 bits | ||
11 | Mode résultat de détection | Données de détection 2D, imagerie 3D Slice | ||
12 | Environnement | -20 ℃ ~ + 50 ℃, température de stockage : -40 ℃ ~ + 60 ℃ | ||
Spécification de l'antenne TBT :
Types d'antennes | Fréquence centrale | Largeur d'impulsion | Plage de profondeur | Profondeur de référence | Applications d'antenne |
Antenne de couplage au sol | 900 MHz | 1,1 ns | 0.5~1,5 m | 0,7 m | Contrôle qualité du revêtement/pose du tunnel, plate-forme inspection des maladies, détection de la structure du bâtiment |
400 MHz | 2,5 ns | 1~4m | 2,5 m | Inspection de la qualité du revêtement/pose de tunnels, détection des maladies de la plate-forme routière, détection des services publics, détection de la conservation de l'eau et de l'ingénierie hydroélectrique | |
200MHz | 5ns | 1~6m | 4m | Détection des maladies de la plate-forme routière, inspection de la qualité des radiers, détection des services publics, conservation de l'eau et ingénierie hydroélectrique, études géologiques | |
Note importante: Til pénètre en profondeur de l'antenne est étroitement En rapport avec la conductivité du milieu, plus la conductivité est élevée, plus la profondeur de pénétration de l'antenne est faible. La profondeur de pénétration diminuera fortement dans l'argile humide. La profondeur de pénétration ci-dessus est sous condition absolue de valeur théorique ; | |||||
Paramètres du système radar GER-MIMO 3-D
Non. | Article | GER-MIMO 900A14RS Radar à réseau 3D | GER-MIMO400A10RS Radar à réseau 3D | GER-MIMO200A8RS Radar à réseau 3D |
1 | Numéros de chaînes | 14 | 10 | 8 |
2 | Profondeur de détection | ≥1,0m | ≥2,5 m | ≥4,0m |
3 | Couvrant largeur | 150 cm | 175 cm | 200 cm |
4 | Détection vitesse | ≥25 km/h (intervalle de 5 cm pour le scan) | ≥16 km/h (intervalle de 5 cm pour le scan) | ≥20 km/h (intervalle de 5 cm pour le scan) |
5 | Taille | 150x30x15cm | 175x32x20cm | 210x45x20cm |
6 | Poids | ≤20kg | ≤25kg | ≤30kg |
7 | Consommation d'énergie | ≤20W | ≤20W | ≤20W |
8 | Source de courant | Alimentation par batterie au lithium installée à l'extérieur 10 V ~ 18 V | ||
9 | Type de tableau | Réseau d'antennes MIMO | ||
10 | Octets A/D | 16 bits | ||
11 | Mode résultat de détection | Données de détection 2D, imagerie 3D Slice | ||
12 | Environnement | -20 ℃ ~ + 50 ℃, température de stockage : -40 ℃ ~ + 60 ℃ | ||
Spécification de l'antenne TBT :
Types d'antennes | Fréquence centrale | Largeur d'impulsion | Plage de profondeur | Profondeur de référence | Applications d'antenne |
Antenne de couplage au sol | 900 MHz | 1,1 ns | 0.5~1,5 m | 0,7 m | Contrôle qualité du revêtement/pose du tunnel, plate-forme inspection des maladies, détection de la structure du bâtiment |
400 MHz | 2,5 ns | 1~4m | 2,5 m | Inspection de la qualité du revêtement/pose de tunnels, détection des maladies de la plate-forme routière, détection des services publics, détection de la conservation de l'eau et de l'ingénierie hydroélectrique | |
200MHz | 5ns | 1~6m | 4m | Détection des maladies de la plate-forme routière, inspection de la qualité des radiers, détection des services publics, conservation de l'eau et ingénierie hydroélectrique, études géologiques | |
Note importante: Til pénètre en profondeur de l'antenne est étroitement En rapport avec la conductivité du milieu, plus la conductivité est élevée, plus la profondeur de pénétration de l'antenne est faible. La profondeur de pénétration diminuera fortement dans l'argile humide. La profondeur de pénétration ci-dessus est sous condition absolue de valeur théorique ; | |||||
L'interface du logiciel est composée de ces zones : 'Barre de menu, tranche de lieu radar 3D, 3 vues-X, 3 vues-Y, 3 vues-Z, barre de canal unique, position actuelle, barre d'état '
L'interface du logiciel est composée de ces zones : 'Barre de menu, tranche de lieu radar 3D, 3 vues-X, 3 vues-Y, 3 vues-Z, barre de canal unique, position actuelle, barre d'état '


